
Views: 16
在这里,EAK解释了确定伺服电机系统受控运动的再生功率要求和再生电阻器选择所需的数据。
电动交流伺服电机是同步或异步电机,用于闭环(伺服)配置,以实现精确的输出控制。对运动输出(包括位置、速度和扭矩)的控制依赖于从机械或其电机上的传感器到电机控制器(驱动放大器)的反馈信号。当位置环路围绕速度环闭合时,双向伺服机构控制:
电机的物理位置、速度和/或扭矩,以实现某些特定目的,以及电机对不断变化的负载、干扰和命令的响应。
所需的反馈信号可以由耦合到电机/负载的多个反馈设备产生,也可以由单独耦合的反馈传感器(从中派生其他必要的反馈信号)产生。速度环路与位置无关,可以控制双向速度和扭矩,同时控制电机速度、电流以及对不断变化的负载、干扰和命令的响应。
伺服电机及其动能和电能
直流有刷伺服电机设计已经存在了五十多年,交流异步伺服电机设计自 1980 年代中期以来。但在当今的自动化行业中,旋转伺服电机一词通常是指基于永磁 (PM) 交流同步电机技术的执行器。同样,线性伺服电机通常是指基于永磁交流同步电机设计的线性执行器。这些电机驱动旋转轴或线性轴,穿过垂直、水平或其他平面。
每个伺服电机在规定的时间段内精确控制(并且经常重复)的加速、横移、减速和停留都由运动曲线表示。运动曲线的每个部分都具有相关的能量,这些能量是受控运动的速度和载荷的函数。动能由总转动惯量或质量以及指令(和实现的)轴速度存储。假设没有势能源,用于将轴加速到其指令速度的能量由伺服驱动器的电源提供。同样,相同质量或旋转惯性的减速需要通过某种物理手段吸收或耗散存储的机械能。当电机进入发电运行时,会发生能量吸收或耗散:
在正常减速期间(机器正常运行)或在事件驱动的停止功能期间,例如在 NEC 1 类紧急停止 (e-stop) 或 2 类优先停止 (p-stop) 中的受控运动期间,即施加驱动控制电源以最大限度地减少事件驱动的停止时间。
当伺服电机系统在受控减速过程中恢复轴动能时,伺服电机进入动力再生模式……将多余的机械能转换回电能。根据设计,它的驱动器将能量返回到最初用于向电机提供能量的同一电源。如果电源是电池,则返回的电源只会为该电池充电。更常见的交流线路输入功率驱动器通过其直流母线电容(超过标称存储的焦耳)吸收由此产生的额外能量(焦耳)。增加的直流母线电压(抽高直流母线)是直流母线电容器吸收的额外能量的物理效应。
然而,直流母线电容和最大最终电压受驱动器设计和所选电容器的限制。在制造环境中,典型的伺服电机由直流母线的脉宽调制 (PWM) 供电,通过全波三相桥式整流电路(通常由 208 至 480 Vac 供电,尽管电压要求较低)。
每当伺服电机减速时(无论电机周围是否有封闭的外部伺服回路),动能都可能返回驱动器的电源。在轴减速时,机械存储的能量被转换回电能……任何未因机械摩擦而损失或在电机内耗散的能量(如电机充当交流发电机时)必须被驱动器吸收。当电机电动势 (emf) 的内部产生的电压超过驱动器提供的电压时,就会发生这种情况。然后,产生的电动势成为主要的动力源——反转电机绕组内的电流。这反过来又会导致轴上的制动动作。

关于再生能源的问题:当由轴的运动曲线定义的受控运动要求伺服电机转换(再生)的能量超过给定伺服驱动器的直流母线电容器可以安全吸收的能量时,会发生什么?
答:必须转移超过直流母线电容存储容量的额外能量,以便直流母线电压在正常运行和停止功能事件期间保持在其最大安全工作值以下。超过直流母线电压应导致驱动器故障并关闭。这种多余的能量可以通过以下一种或多种方法来处理:
1.增加总直流母线电容,以获得更高的能量吸收能力。这可以通过在主题直流母线上添加一个外部电容模块,或者将多个驱动器连接在一起以获得公共/共享直流母线来实现。
2.通过添加交流线路再生模块,将多余的能量呈现并返回到交流线路电源。这种方法的缺点是它会大大增加驱动系统电子设备的成本和尺寸。
3.使用伺服驱动器的再生电路将多余的直流母线能量耗散在再生(再生)功率电阻器上。这是一个常用的解决方案。
再生电阻器是一种电阻功率器件,用于耗散抽取的直流母线能量,以消散多余的能量。直流母线电压通过向再生电阻倾储功率来控制,并且(只要再生电路的功率倾销能力超过电机返回的功率),直流母线电压就会下降。以受控方式反复打开和关闭直流母线电容器上的再生电阻器,将使直流母线电压保持在整流交流线路电压(标称直流母线)和驱动电子设备设置的直流母线电压上限之间的安全范围内。
如果再生电阻器尺寸过小或需要再生电阻器的地方没有再生电阻器,则生产速度可能会降低,甚至可能会因过电压引起的不良跳闸而关闭机器……熔断或跳闸保护电路…和/或驱动器组件损坏。
再生电阻器问题:工程师如何确定是否需要再生电阻器?如果需要这样的电阻器,它的电阻和瓦数值应该是多少?
答:简而言之,我们必须评估机器运动周期中的功率流。如果从电机到驱动器的能量/时间功率流对驱动器的直流母线电容器具有显著的功率分配,则系统将需要一个功率电阻器来耗散多余的再生功率。否则,需要降低功率流。这种再生分析通过考虑总返回能量而不是功率流的确切细节来简化。将机械动能 E(k) 减去所有适用损耗 E(el) 和 E(f) 以及任何外力 E(ext-f) 的总和,与驱动器的直流母线电容器储能容量 E(caps) 进行比较。如果总回收能量 Er(total) 大于直流母线电容 E(caps) 的额外存储容量,则需要一个再生电阻器。

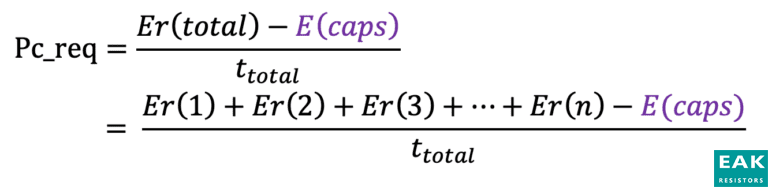
应选择连续功率容量大于应用要求的再生电阻器,以满足 ( Pc_req = (Er(total) – E(caps))/t_total)。对于具有公共直流母线电容的多轴机器,总连续功率需求 Pc_req(total) 是通过将每个轴的连续功率需求与公共直流母线服务的轴数相加来确定的。用方程表示,这个Pc_req(总计)为:
Pc_req(A1) + Pc_req(A2) + …Pc_req(轴#)。
但首先,我们需要计算所考虑的轴的每个减速 (n) 的动能减去损失 Er(n),其中 Er(n) = E(k) – E(el) ± (ext-f) – E(f) 并且:
Er(n) = 1/2(J_load + J_motor) ωm2
– 3(我2_dec × Rm/2) t_dec
± (T_ext × Δωm/2) t_dec) – (Tf × Δωm/2)
t_dec。
其中 Er(total) = Er(1) + Er(2) + Er(3) + …Er(n)。
对于所考虑的每个轴,我们必须确定轴运动剖面的每个表示运动段,以及要吸收或耗散的潜在回收动能(焦耳)。轴运动曲线中每个定义的减速段都可能产生一些回收的动能 Er(n),需要直流母线电容吸收,并可能由再生电阻器进一步耗散。因此,应考虑每个轴的每次减速。
计算每个轴的回收能量 Er(总) 在机器的循环时间(或任何特定减速度 n)内耗散的总和很简单。这反过来又决定了所选再生电阻所需的最小连续功率能力:
其中 t_total = 轴循环时间
Pc_req(总计) = Pc_req(A1) + Pc_req(A2) + …Pc_req(A#) 任何给定的轴 (A#) 及其生成的 Er(n)
< 1 都设置为 = 0。
请注意,对于在活动运动之间具有较大驻留的运动曲线,任何给定轴 (A#) 的计算Pc_req都可能变得非常小。在这些情况下,通常选择再生电阻来满足峰值功率要求,而不是随时间推移的平均要求。此外,多轴机器经常会出现一个轴返回能量而另一个轴同时消耗能量的情况,因此净返回的能量可能接近或为零。因此,除非所有机器轴同时返回能量(如在受控运动停止功能期间),否则工程师应考虑所有返回能量的时间。
一旦知道正常工作(而不是停止功能)的总连续功率 (Pc_req(total)) 要求,就可以通过减去额外的直流母线电容吸收能力来实现进一步的改进。
考虑峰值功率条件
正确选择再生电阻还需要计算峰值要求 (Ppk_req)。这些值的计算方式与Pc_req值非常相似,但通常是针对减速开始前电机的峰值(最大)功率……在电力再生模式的时间零 (t_0)。
峰值功率问题:确定峰值能量 Er(n) 或 Er(wc) 及其吸收要求的最高功率最坏情况 (wc) 条件何时发生?
答:这些条件通常由具有最高质量或转动惯性和速度的运动段定义,以 E(k) 表示。但无论减速发生的时间段如何,都必须吸收最坏情况下回收的能量 Er(wc)。
在正常机器运行下,独立减速轴可能而且经常需要通过其他方式(例如使用多个驱动器共享的直流母线电容)将恢复的动能耗散到高于直流母线电容存储容量之上。有时,根据变频器的交流输入线设置的峰值可能返回能量及其峰值输出电流来设置峰值再生能力会更容易……少一点损失的余地。20%的损失幅度是一个很好的经验法则。换言之,对于三相伺服电机,上限峰值功率 (VA) 等于 0.8 ·(交流线路 Vac) ·(驱动峰值相电流) ·√3.
当然,安全性是大多数机器设计(及其轴)的首要设计目标。设计伺服控制运动的最佳实践要求控制运动的 p-stop 和 e-stop 的停止时间尽可能短,只有少数例外。理想情况下,机器的每个伺服控制轴都应该能够在最短的时间内停止受控运动,以最大限度地保护人员、机器和产品。为了满足受控运动的这一要求,需要对每个轴的停止函数 Er(sf) 的回收能量进行单独评估:
Er(wc) 或 Er(sf) = E(k) – 3(I2_dec × Rm/2) t_dec
± (T_ext × Δωm/2) t_dec) – (Tf × Δωm/2)
t_dec
其中 E(k) = 1/2(J_load + J_motor) ⋅ ωm2= 比动能 E(k),用于确定所考虑的特定轴的最大回收 Er(wc) 或 Er(sf)。
注意:电机应用开发的所需I_dec必须在规定时间(t_dec)内电机的峰值电流能力 Ipk(电机)和建议的伺服驱动器的峰值电流 Ipk(驱动器)能力范围内。否则:
必须增加所需的t_dec和/或
应选择不同的伺服电机和/或
应选择具有更高容量的其他驱动器。
这样,I_dec(必需)≤ Ipk(电机)和 Ipk(驱动)功能,其中 Ipk 是峰值 RMS 相位 (Ø) 电流和I_dec:

此外,Ppk_req = Er(n)/t_dec 其中 Er(n) = Er(wc) 表示正常轴操作下的最坏情况 (wc) 瞬时峰值,Er(sf) 表示停止功能,例如 p 止动或急停 – 是两个独立的评估。
直流母线容量 E(caps) 的任何部分都不被视为 (Er(n) – E(caps))/t_dec) 中的部分,因为无法保证或轻松确定停止功能发生之前的可用直流母线容量。任何选定再生电阻的最大值R_regen(Ω)不得超过:
其中 Ppk_req(总计)表示需要从直流母线排出的能量速率。这是应用定义条件下的最大可能电阻值,该条件将持续将直流母线运行保持在最大值以下 VDC_max(故障)。
当然,再生电阻的峰值功率要求 (Ppk_req) 和选择可能会因使用尽可能短的停止时间而受到影响,例如在停止功能期间。对于某些具有共用直流母线的单个轴或多个机床轴,定义减速(以及再生电阻选择的决定因素)基于受控停止的最佳实践设计评估。在这里,再生电阻是根据峰值功率要求选择的。否则,当正常轴操作需要再生电阻时,Pc_req是典型的主导标准。
同样,要小心相对于总循环时间(t_total)具有显着停留时间的运动曲线……特别是相对于计算出的正常操作Ppk_req。
平衡相互竞争的电阻器目标
电机驱动选型程序应查看每个运动段以计算Pc_req并确定正常轴操作的最坏情况Ppk_req……尽管典型的选型程序需要对具有唯一值的减速事件进行单独评估。给定轴的所有急停和p停功能通常设置为相同的最小减速停止时间。
对于具有共用和公共直流母线的多轴机器,在停止功能事件期间所有轴同时减速需要一个电阻值,以便 VDC 总线保持在 VDC_max(故障)以下。
规格提示: 如果可能,请选择再生电阻器制造商的标准欧姆值,或在其公布的范围内选择一个。工程师应通过选择再生电阻器来确保不超过制造商公布的最大连续/峰值电流:
具有足够高的阻力,同时也确保再生电阻欧姆值足够低,以将直流母线电压保持在驱动器的最大(故障)值以下对于后者,这意味着在正常操作(法向轴减速/停止)和任何急停或p停止期间,Vmax = VDC_max(故障)– 1。对于任何选定的再生电阻R_regen(Ω),可以计算直流母线电容的最大分流电流:
在定义的应用中,计算所选再生电阻的最大瞬时或脉冲、峰值功率:
所选再生电阻器的能力必须满足以下条件:
1. Pc_resistor(瓦数)>轴计算所需Pc_req。
2. Ppk_resistor(瓦数)>轴计算所需Ppk_req(在所有条件下)。
3. R_regen(Ω) 必须在所选驱动器的指定再生电阻范围内,其中外部电阻可以由驱动器制造商表示为欧姆范围和/或首选标准值。
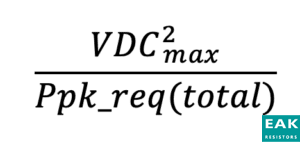
4. 如前所述,任何选定的再生电阻器的最大值R_regen(Ω)不得超过:
即使所有轴同时减速也是如此,例如在完全机床停止期间,如 Ppk_req(total) = Ppk_req(A1) + Ppk_req(A2) + Ppk_req(A3) + … + Ppk_req(A#) 所定义。所选R_regen(Ω)应小于所定义应用条件下的最大可能电阻,该条件将使直流母线持续保持在其最大值VDC_max(故障)以下。
R_regen(Ω) > Pc_req(总计)/I2_shunt(最大驱动值)和所选R_regen(Ω)应大于所选驱动器或电阻器定义的最大可能再生分流电流能力的最小可能电阻。这将连续操作的再生电流限制在低于最大分流能力的范围内。
对于许多再生电阻器,峰值/脉冲功率能力是由经验法则固定的连续能力的倍数(例如,10倍或15倍)确定的。瞬时峰值能力(如给定再生电阻器的连续能力)是其物理设计、材料、占空比(使用和应用)和制造工艺的函数……在所有情况下,都应公布电阻器的峰值容量或以其他方式定义。一旦选择了电机额定再生电阻器,当所有必需的应用和电阻器信息已知时,可以使用非线性微分方程来查看更具体的功能与要求。